La nueva Plataforma de Inteligencia de Vehículo, o VIP. de GM, utilizada actualmente en modelos Corvette, CT4, CT5 2020-2022 y Tahoe, Suburban, Yukon, Escalade y Envision 2021-2022, ofrece un incremento de capacidad y la posibilidad de administrar mejor la complejidad de la tecnología.
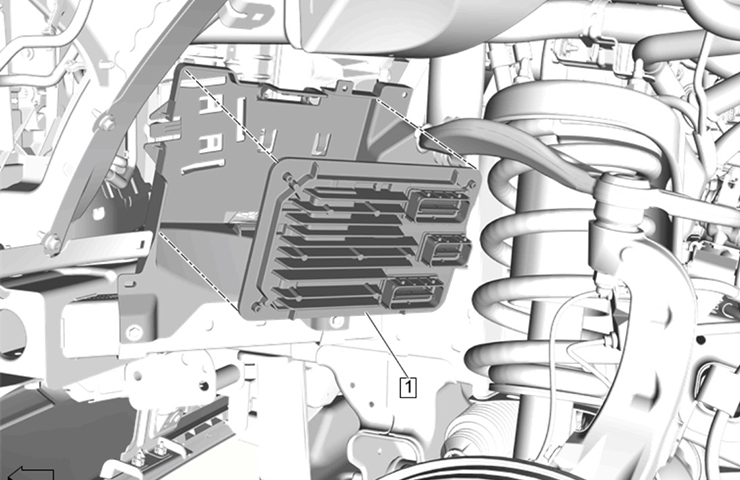
Con un incremento de cinco veces en la capacidad del sistema y capacidad de respuesta sobre el sistema Global A, la arquitectura eléctrica VIP de siguiente generación ofrece la capacidad de administrar más de 100 módulos de computadora. Puede soportar sistemas de seguridad activa, actualizaciones de software de vehículo inalámbricas [Over-the-Air (OTA)], redes 5G, protecciones de ciberseguridad mejoradas y tecnologías EV. (Fig. 1)
 Fig. 1
Fig. 1
La arquitectura eléctrica VIP incluye buses CAN de dos cables y buses Ethernet de dos cables para garantizar la transferencia de datos de alta velocidad y múltiples buses LIN de cable sencillo para intercambiar información entre los módulos de control maestro y otros dispositivos inteligentes. Las redes de Red de Área Local de General Motors (GMLAN) de baja velocidad ya no se usan en vehículos VIP.
Protocolo CAN
El protocolo de comunicación de arquitectura VIP se basa en el protocolo de Red de Área de Controlador [Controller Area Network (CAN)] ampliamente usado. Los buses CAN se utilizan cuando es necesario intercambiar datos a un ritmo elevado, principalmente mediante un dispositivo de control que utiliza la información para ajustar el sistema de un vehículo, como el tren motriz o los controles de la carrocería. Cada red de datos CAN consiste en dos cables trenzados, llamados CAN (+) y CAN (-), con un resistor de terminación de 120 ohm (Ω) en cada extremo del bus entre los circuitos CAN (+) y CAN (-).
La tecnología de comunicación de datos Ethernet utiliza un par trenzado de cables sencillo en velocidades de 100 Mbit/s y 1000 Mbit/s. El sistema Ethernet usa comunicación de punto a punto que se conecta por medio de un interruptor Ethernet [Module <–> Switch <–> Module]. El bus Ethernet no usa resistores de terminación.
El Módulo Gateway de datos en serie K56 y el Radio A11 tienen un interruptor Ethernet que se conecta a otros módulos Ethernet. Estos módulos se comunican con otros dispositivos y sistemas en el vehículo por medio de los buses CAN y LIN. Los DTC se leerán en el CAN para diagnosticar fallas de Ethernet, LIN y del sistema.
Cualquier falla del arnés Ethernet se debe reparar únicamente con el juego apropiado para realizar revestimientos de retiro/reinstalación de clavija. En casos en los que los juegos de reparación de arnés de cableado no estén disponibles, se debe reemplazar el arnés completo. No se deben realizar engarces o empalmes en el arnés de cableado Ethernet.
Gateway de datos en serie
Para indicar cualquier pérdida de comunicación y DTC establecidos, el Módulo Gateway de datos en serie K56 debe conocer y programar los módulos de control en el vehículo y sus buses relacionados. Si el Módulo Gateway de datos en serie se reemplaza o se agrega otro módulo al bus, como un accesorio instalado por el concesionario, se debe realizar un proceso de programación utilizando el procedimiento de programación de Módulo Gateway de datos en serie en SPS.
El proceso de programación no causará que ningún contenido programado anteriormente se olvide o sobreescriba. Si el proceso de programación no se completa en un nuevo Módulo Gateway de datos en serie, se establecerá el DTC U1977 (Programación automática de identificación de ECU no completada) hasta que se realice el procedimiento de programación. Si el proceso de programación no es válido debido a una falla interna o un intercambio de Módulo Gateway de datos en serie, se establecerá el DTC U3000 42 (Módulo de Control – Falla de memoria general) o el DTC U3002 56 (Número de identificación de vehículo – Configuración no válida/Incompatible). El Módulo Gateway de datos en serie entonces perderá comunicación con todos los módulos de control y establecerá los DTC contra módulos de control que no estén en el vehículo.
El Módulo Gateway de datos en serie también funciona como compuerta para aislar las redes seguras en el vehículo de las redes inseguras. Aislar las redes primarias ayuda a asegurar que los sistemas de asistencia avanzados del conductor y funciones de seguridad activa, como la prevención de colisión mejorada, puedan operar en conjunto entre sí. Si el software dañino entra al vehículo a través del sistema de infoentretenimiento, OnStar, o el DLC, otros sistemas del vehículo se pueden afectar.
Modo de energía
En la arquitectura VIP, el Módulo de control de la carrocería (BCM) K9 es el Maestro de modo de energía (PMM) y el Módulo Gateway de datos en serie K56 es el PMM de respaldo. Hay cinco modos de energía, Apagado, Accesorios, Modo de operación/servicio (motor apagado), Impulso (Motor encendido), y Arranque. Como el PMM, el BCM usa varios estados y entradas del vehículo para determinar qué modo de energía se requiere. Reporta esta información a otros módulos por medio de datos en serie.
Se requiere MDI 2
Se requiere la MDI 2 EL-52100 para la programación, configuración y ajuste del módulo de control en vehículos equipados con la arquitectura VIP. La MDI 1 no tiene la capacidad de completar los procedimientos de programación y configuración. Usar una MDI 1 en estos vehículos podría resultar en datos erróneos o eventos de programación fallidos que podrían guiar al reemplazo innecesario del módulo.
Cuando se instale la herramienta de exploración, intentará comunicarse con cada módulo de control que pueda estar disponible en el vehículo, dependiendo del equipo opcional. Si la opción no está instalada en el vehículo, la herramienta mostrará No Communication (No hay comunicación) para ese módulo de control. Para evitar el diagnóstico incorrecto de un mensaje No hay comunicación, consulte las Referencias de enlace de datos que indican los módulos de control y los buses con los que se comunican los módulos en la Información de servicio apropiada y los códigos RPO de fabricación del vehículo para determinar los módulos de control opcionales.
Programación de un módulo
Cuando programe un módulo con SPS (Sistema de Programación de Servicio) (Fig. 2), siga todas las instrucciones en pantalla del SPS.
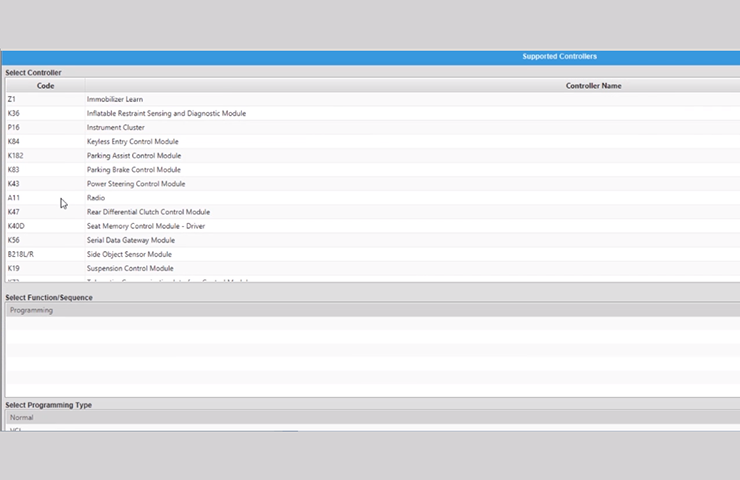 Fig. 2
Fig. 2
Estos consejos también deberían ayudar a la programación exitosa:
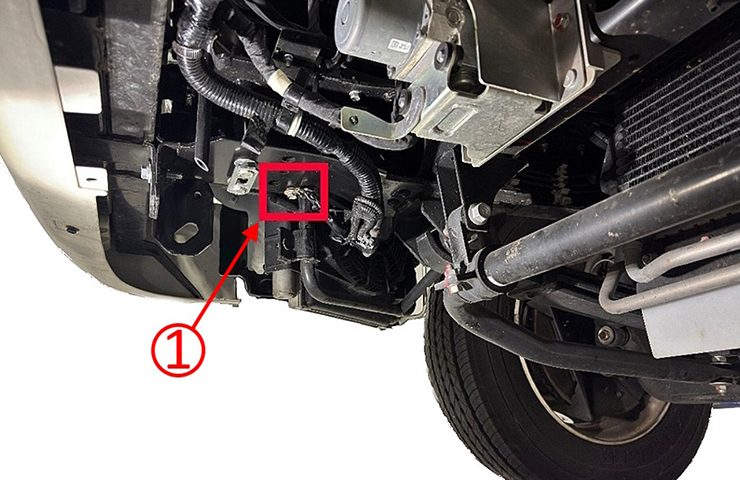
Confirme el VIN – Techline Connect (TLC) no ejecuta automáticamente la Lectura de Número de Identificación del Vehículo (VIN) con el modo de energía apagado. Los técnicos deben confirmar que el VIN esté identificado correctamente antes de programar al verificar que el VIN reflejado en Techline Connect coincida con la placa de VIN en el vehículo. (Fig. 3) Asegúrese de no seleccionar un VIN que ya esté en la memoria de la aplicación de Techline Connect de un vehículo anterior.
Para usar la Lectura de VIN cuando use Techline Connect. el modo de energía del vehículo (ignición) debe estar encendido antes de leer el VIN del Módulo de control del motor (ECM) del vehículo, que es el módulo maestro del VIN del vehículo. La programación y reprogramación de módulos con el VIN incorrecto y usar software y archivos de calibración de VIN incorrectos puede causar problemas de servicio futuros así como problemas de desempeño del vehículo potenciales que pueden requerir que el vehículo se reprograme de nuevo.
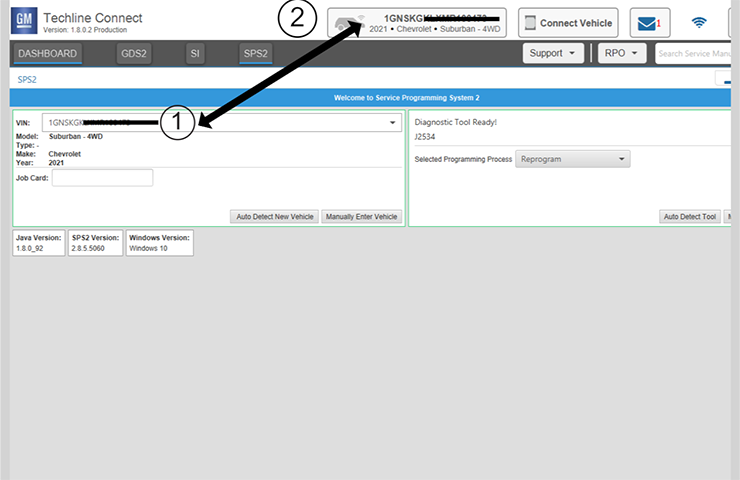 Fig. 3
Fig. 3
Voltaje de batería – El voltaje estable de la batería es crítico durante la programación. Cualquier fluctuación, pico, sobrevoltaje o pérdida de voltaje interrumpirá la programación. Instale una Herramienta de soporte de programación autorizada por GM para mantener el voltaje del sistema. No use un cargador de batería.
Modo de energía apagado – El modo de energía (ignición) debe estar apagado para comenzar la programación del módulo. Cualquier carga en la batería del vehículo, como las luces interiores, luces exteriores y Luces de operación diurna, y la operación de HVAC, puede afectar el proceso de descarga y puede causar que ocurran errores.
No cambie el modo de energía – No cambie el modo de energía del vehículo (posición del interruptor de ignición) durante el procedimiento de programación a menos que se le indique hacerlo. La programación indicará a los módulos de control apropiados para cambiar el modo de energía conforme se necesite durante el procedimiento, independiente del modo de energía del vehículo.
Mantenga el vehículo completamente inactivo – Asegúrese que el vehículo no se active durante el evento de programación al mantener todas las puertas cerradas (vehículo completamente inactivo). Para acceso al vehículo, accione el seguro de la puerta del conductor a la posición cerrada de forma que la puerta pueda permanecer abierta. Si se abre una puerta cerrada durante la programación, los buses se activarán y causarán que se establezcan códigos de error
Borre todos los DTC – Después de la programación, borre todos los DTC y permita que el vehículo entre en modo de suspensión. Los DTC U1962 (No se puede autenticar mensaje de datos en serie) y U1983 (Falla interna de hardware de seguridad de módulo Gateway de datos en serie) se pueden establecer y el Indicador de falla (MIL) Revise el motor se puede iluminar si los DTC no se borran y el vehículo no se suspende después de la programación o Configuración de autenticación de datos en serie (SDAC).
Si la SDAC falla, se establecerá el DTC U1962 como un DTC actual. No se borrará hasta que ocurra otro evento de programación que ejecute la SDAC, o se realice el procedimiento SDAC independiente con SPS. Si el DTC U1962 está almacenado únicamente como un DTC histórico y no se recupera como un DTC actual, no realice el procedimiento SDAC.
Espere 5 minutos – Después de la programación, deje que el vehículo se asiente durante cinco minutos con la ignición apagada, Energía retenida para accesorios apagada y el transmisor de llave retirado del vehículo después de completar la programación. Después de cinco minutos, se puede operar el sistema para verificar las reparaciones.
– Gracias a Bret Raupp y Peter Shear