Conforme la tecnología en los nuevos vehículos continúa evolucionando y expandiéndose, un ancho de banda eléctrico y conectividad adicionales se han vuelto necesarios para asegurar que todas las características impulsadas por datos puedan operar eficientemente dentro de la red general del vehículo. La Plataforma de Vehículo Digital de Siguiente Generación, la plataforma electrónica completamente nueva de GM, se usará para ayudar a energizar la siguiente generación de modelos y sistema GM, incluyendo los vehículos eléctricos, sistemas de seguridad activa, sistemas de infoentretenimiento, y una variedad de características de conectividad. (Fig. 1) El nueva plataforma entrará en producción más tarde este año con las presentaciones de los nuevos Chevrolet Corvette y Cadillac CT5 y CT4 2020.
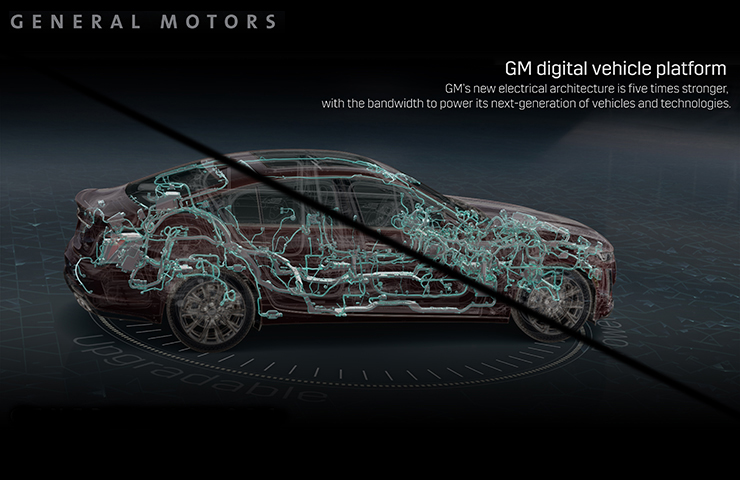 Fig. 1
Fig. 1
La Plataforma de Vehículo Digital de Siguiente Generación energiza un nuevo sistema electrónico que es capaz de administrar hasta 4.5 terabytes de potencia de procesamiento de datos por hora, que es un incremento de cinco veces la capacidad sobre la arquitectura eléctrica Global A actual. La nueva arquitectura proporciona comunicaciones más rápidas dentro del mismo vehículo así como a fuentes externas con conexiones Ethernet de 100Mbs, 1Gpbs y 10Gbps.
El sistema presenta el protocolo de Red de Área de Controlador con Tasa de Datos Flexible [Controller Area Network with Flexible Data-Rate (CAN FD)], que soporta comunicación de datos mejorada y programación más rápida al transmitir y recibir datos en una mayor tasa de bits máxima. Una tasa de bits más rápida permite que más datos se incluyan en un mensaje sencillo, reduciendo la necesitada de más redes (y cableado adicional) en un vehículo, lo que también reduce el peso e incrementa el desempeño.
Comunicación CAN
La Plataforma de Vehículo Digital de Siguiente Generación puede incorporar hasta nueve buses CAN de alta velocidad. No se usan GMLAN de baja velocidad y MOST.
La información de información y datos de la herramienta de exploración se proporciona utilizando los buses CAN 6 y 7, que sólo operan entre el DLC y el Módulo Gateway de datos en serie, y GDS 2 los usa para proporcionar datos del sistema desde las otras redes CAN. Este diseño aisla los buses restantes para asegurar tales redes y proporcionar detección de intrusión mejorada incorporada en el nivel arquitectónico.
El bus CAN del tren motriz se comunica a través de un circuito dedicado pero los otros buses CAN usan un mensaje de activación desde el Módulo Gateway de datos en serie, que se puede personalizar para activar módulos individuales cuando se necesite. El Módulo de compuerta de datos en serie se actualiza primero durante la programación y después cualquier otro módulo se programa a través del Módulo Gateway de datos en serie.
CONSEJO: La programación ahora se realiza con todas las puertas cerradas y la ignición apagada. Con este nuevo proceso, el Módulo Gateway de datos en serie puede activar un módulo específico para la programación sin ninguna otra información en el bus, que también promueve la programación más rápida.
Además, hay varios Códigos de Problema de Diagnóstico (DTC) que han cambiado desde la Arquitectura Global anterior (Global A) a la nueva Plataforma de Vehículo Digital de Siguiente Generación.
Soporte de GDS2
La actualización de software 21.1.07400 de Núcleo de GDS2 agregó la capacidad de Plataforma de Vehículo Digital de Siguiente Generación.
Para diagnósticos de comunicación, el Módulo Gateway de datos en serie periódicamente encuestará la comunicación del módulo a través de todas las sub-redes. Cuando se detecta un evento sin comunicación, la información se registra y presenta en una tabla bajo Vehicle Diagnostics (Diagnósticos del vehículo) > Vehicle Communication Diagnostics (Diagnósticos de comunicación del vehículo) > Network Communication Event Results (Resultados de evento de comunicación de red).
Los resultados de evento incluyen hasta 50 registros (hasta 9 registros por CAN1 o CAN2 y hasta 8 registros por CAN3, CAN4, CAN5, o CAN8). Seleccione la pestaña CAN Bus Records (Registros de bus CAN) para ver los datos registrados. Muestra el bus CAN que encontró un evento y el número de veces que ocurrió la falla (hasta un máximo de 255). Además, las estampas de tiempo indican la hora de la primera falla — mientras mayor sea el número, más reciente es el evento — y la última falla, que se muestra cuando el evento ya no está presente. La columna Delta muestra la diferencia entre el tiempo actual y la primera falla, con un número menor que indica un evento más reciente. (Fig. 2)
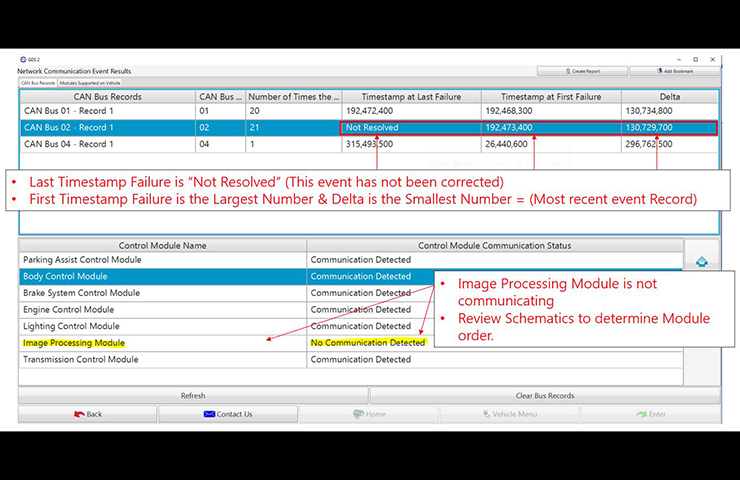 Fig. 2
Fig. 2
Bajo los datos de registro, los módulos de control definidos se indican por nombre mientras que los módulos no definidos mostrarán su identificación (ID) de diagnóstico. El estado de comunicación se indicará como Communication Detected (Comunicación detectada) o No Communication Detected (No se detectó comunicación). (Fig. 3) La información de estado adicional se agregará en años de modelos futuros.
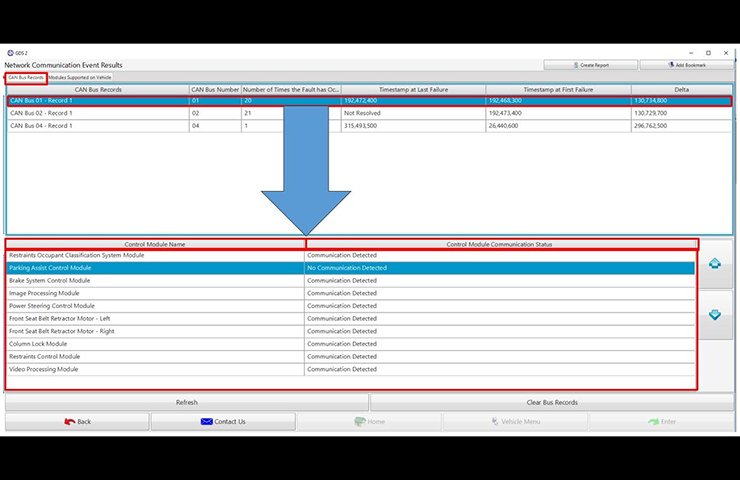 Fig. 3
Fig. 3
El botón “Refresh” (Actualizar) en la parte inferior de la tabla se puede usar para solicitar nuevos datos por solicitud. Cuando ya no ocurran eventos, los registros de evento se pueden borrar seleccionando el botón “Clear Bus Records” (Borrar registros de bus).
Bajo la pestaña Modules Supported on Vehicle (Módulos soportados en el vehículo), los módulos de control se identifican junto con el número de bus CAN conectado a cada módulo. Los módulos conectados a más de un bus se indicarán en múltiples filas. (Fig. 4)
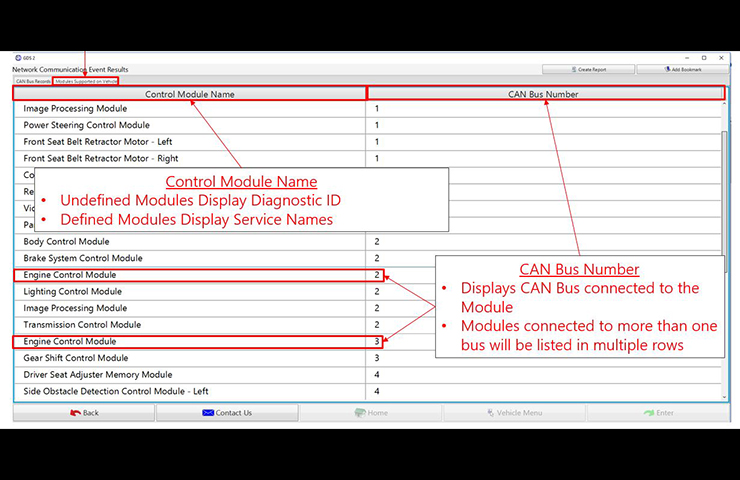 Fig. 4
Fig. 4
El estado de comunicación de red de los módulos de control en cada bus también se pueden ver seleccionando Vehicle Diagnostics (Diagnósticos del vehículo) > Vehicle Communication Diagnostics (Diagnósticos de comunicación del vehículo) > Network Communication Status (Estado de comunicación de red). Cuando verifique el estado, se envía una solicitud a todos los módulos en una sub-red objetivo. Seleccione el botón de actualización en la parte superior de la tabla para ejecutar el procedimiento de estado en ocasiones adicionales. (Fig. 5)
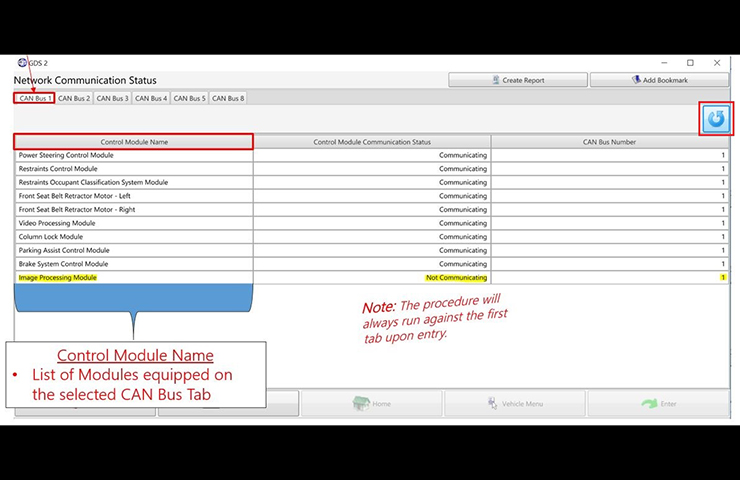 Fig. 5
Fig. 5
La actualización del software GDS2 está disponible al seleccionar el icono GDS2 en TIS2Web. Para asistencia, póngase en contacto con el Centro de Atención al Cliente Techline (TCSC) al 1-800-828-6860 (inglés) o 1-800-503-3222 (francés).
– Gracias a Chris Henley